


Stinger Technology and Stavanger Offshore Technical School work together to give students a more practical take on their final-year projects. In 2021 Stinger was looking for a solution to the opening and closing of valve handles on the seabed, and the solution came through the final-year project of Espen-René Jensen, Gøran Aarsland, Oluf Sander Naaden, and Henrik Aarbakke.
Through testing, calculations, and prototyping, the students developed a fully mechanical tool specialized for one of Stinger’s own ROVs from scratch which could aid Stinger in opening and closing the valve handles. The tool took the shape of a ratchet which was designed to swap between its two functioning directions of rotation. This swap was possible to implement through the drone’s built-in maneuverability.
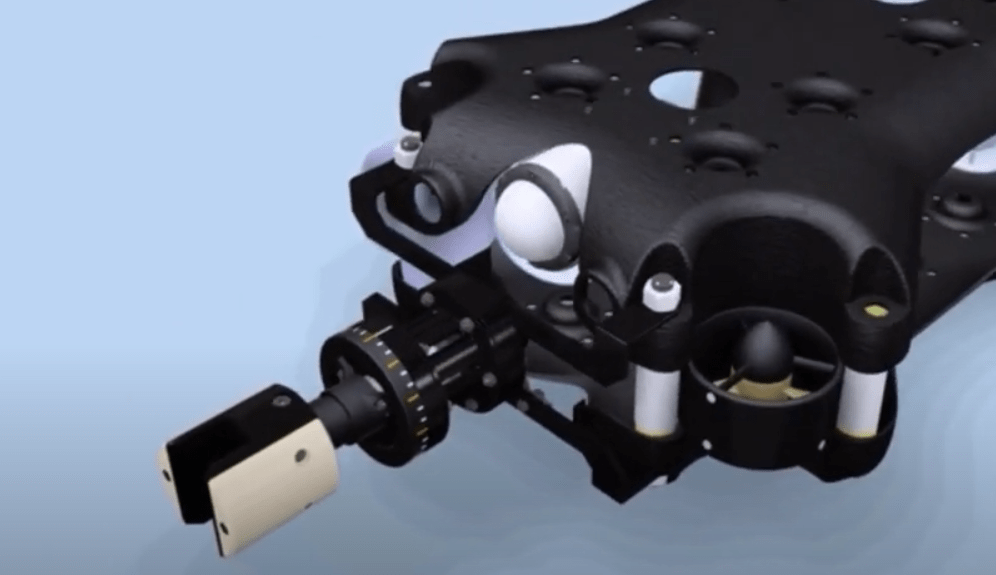
In terms of functionality, the tool is designed to interconnect with the handle through a manipulator when the ROV approaches the valve panel. When the ROV pushes the manipulator onto the switch, by using the spring-loaded function integrated into the tool, the gear within the manipulator changes and rotates the handle leftwards for closing and rightwards for opening. It is the “six-degree-of-freedom” ROV that powers this rotation. When the ROV is driven away from the switch panel the spring-loaded function is designed for the gear to go back to its start position. To orientate the rotation of the tool, the design includes a protractor, and the tool is fastened onto the ROV with a frame and four bolts.
In terms of material, the manipulator is designed with a floating material to generate buoyancy as well as compensate for the weight. Further, the manipulator is shaped to fit the valve panel in which it will be operating. The whole tool is an open system where all components are exposed to seawater during operation. This choice was made to avoid design complications and high costs which often is a consequence of a closed system.